

Homes are getting more expensive every year. And with roughly 40% of the skilled construction workforce set to retire over the next decade, there are fewer tradespeople to build them. If you've gone looking for a place to live recently, or own a home that needs repairs, you've likely felt it. I co-founded Reframe Systems to work on a different approach: software-driven manufacturing and robotics that can deliver high-performance, resilient housing to neighborhoods across the country, at scale.
Reframe Systems
Reframe Systems, Feb 2023 — Present
I co-founded Reframe with Vikas Enti (CEO) and Aaron Small (Head of Operations and Digital AI). I lead Manufacturing, Software, and Robotics, building the full technology stack that powers our microfactory system from the ground up.
Our software-defined, highly automated microfactories produce net-zero homes faster, cheaper, and with a fraction of the carbon of traditional construction. Each microfactory is a compact 50,000 sq ft facility that can launch in roughly 100 days and produce about 500 homes per year, putting manufacturing capacity directly into the communities that need it.
Resilience Is Our Guiding Principle
At Reframe, resilience is an engineering standard, not a marketing label. It's the lens we apply to every product, technology, and business decision we make.
We build off-site, in precision-controlled environments. That removes the field errors and variability of on-site construction, and lets us deliver zero-energy-ready homes at the same price as conventional builds, with lower embodied carbon and better long-term durability.
The Reframe Building System adapts to where homes get built and what they have to withstand: complex sites, hazard zones, evolving energy codes, and the regulatory complexity of 50 state codes and roughly 30,000 zoning jurisdictions. Our microfactories and physical AI carry that same adaptability into manufacturing, so when market demand shifts, the response is a software change.
In the Press
Previously
Senior Robotics System Developer Engineer
Amazon Robotics, Aug 2016 — Jan 2023
Technical Lead for the Sparrow Program, Amazon Robotics' flagship item manipulation system. I built vision-based robotic solutions for singulation, dense packing, item identification, and damage detection, deployed across hundreds of thousands of robotic units in Amazon's fulfillment network.
Senior Robotics Engineer — Humanoid Manipulation
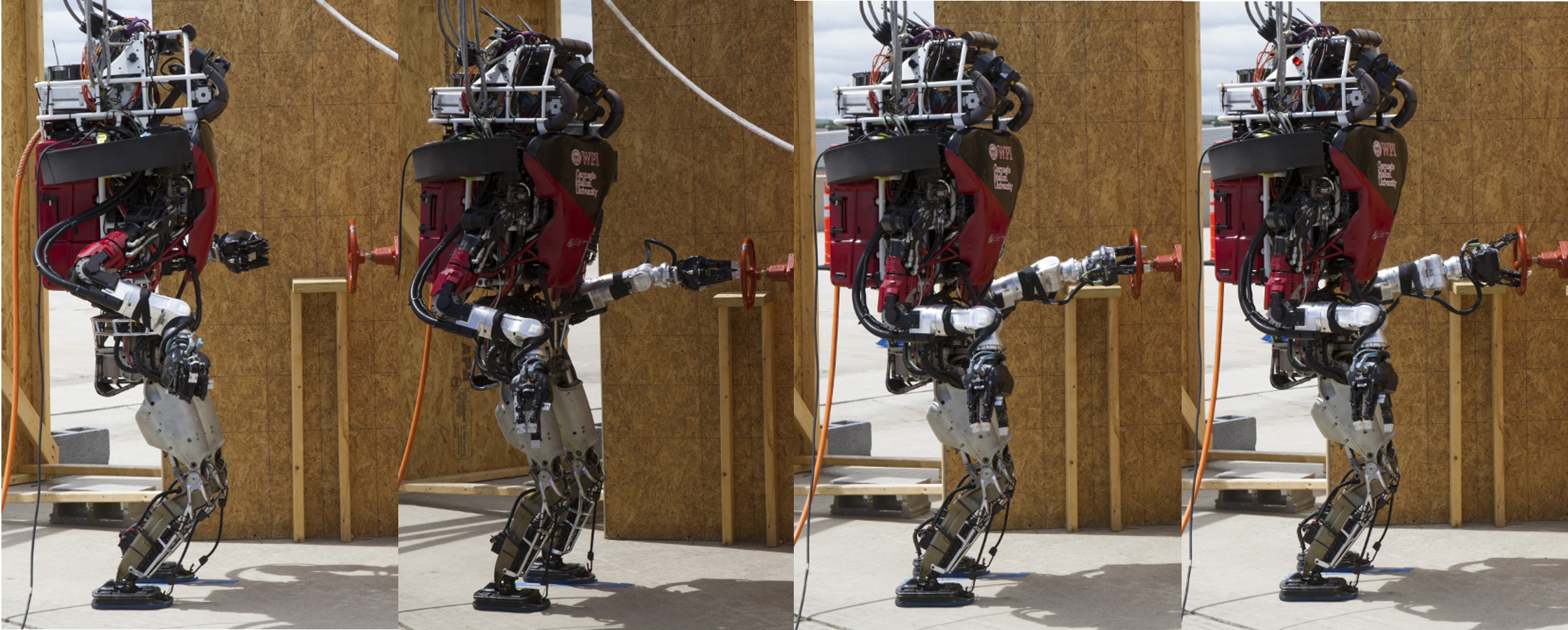
WPI-CMU DARPA Robotics Challenge Team, Dec 2013 — Jun 2015
Manipulation Lead for the WPI-CMU team in the DARPA Robotics Challenge. I led full-body motion planning for the 30-DoF Boston Dynamics Atlas humanoid robot, coordinating a team of graduate and undergraduate students through the DRC Trials and Finals.
Senior Robotics Software Engineer
Dynamic Legged Systems Lab — Italian Institute of Technology, Jul 2015 — Jul 2016
Built the software architecture for the HyQ and HyQ2Max quadruped robots, integrating real-time controllers, state estimation, and simulation on Xenomai Linux.
Education
Patents — 17 Granted US Patents
All patents issued while at Amazon Robotics, covering robotic grasping, end-of-arm tooling, manipulation systems, and safety. View all on Google Patents
Robotic Grasping & End-of-Arm Tools
Manipulation Systems & Robotics Infrastructure
Safety & Calibration
Publications
Team WPI-CMU: achieving reliable humanoid behavior in the DARPA Robotics Challenge
Get in touch
Interested in Reframe Systems, robotics, or just want to connect? Reach me at felipe.polido@gmail.com or find me on LinkedIn.