
Employment
Co-Founder and Head of Technology
Reframe Systems, Feb 2023 -- Current
Reframe Systems is on a mission to build low-carbon housing for all, at massive scale. To achieve our mission, we have re-imagined how housing is designed and built. Our software-defined and highly automated manufacturing microfactory system drives down cost, delivery time, and carbon.
Forbes — Going Micro With A Twist Eliminates Barriers To Offsite HousingChristian Science Monitor - Robots and entrepreneurs work to green the US housing industry
Dave Cooper — Ex-Amazon Team Builds Net-Zero Prefab Homes with Robotic Micro-factories
Zivid — Integrating 3D Vision for Advanced Robotic Construction
Senior Robotics System Developer Engineer
Amazon Robotics, Aug 2016 -- Jan 2023
Sparrow Program Technical Lead, Amazon Robotics' state-of-the-art item manipulation solution. In this role, I developed advanced vision-based robotic systems for singulation, dense packing, multi-modal item identification, and damage detection at Amazon scale.
Tech Crunch — Amazon debuts Sparrow, a new bin-picking robot arm
Robot Report — Meet Sparrow: Amazon’s new item-picking robot
Senior Robotics Software Engineer
Dynamic Legged Systems Lab - Italian Institute of Technology (IIT), Jul 2015 -- Jul 2016
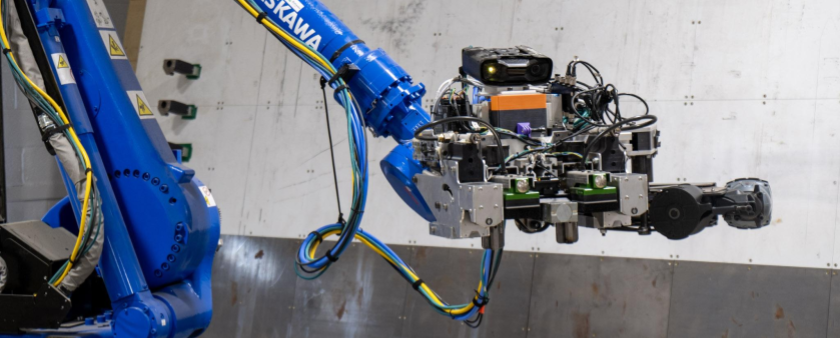
As a Software Engineer in the Dynamic Legged Systems (DLS) laboratory—which focuses on research and development for designing and controlling high-performance, versatile legged robots—I develop modular architectures to support and transition between a range of low- and high-level controllers.
My architecture interfaces seamlessly between different simulators (such as Gazebo and SL) and real hardware. It establishes common interfaces and utilities among controllers, including logging and visualization tools, and manages transitions between various sensor inputs (like VICON Motion Capture and LIDAR) and state-estimation techniques (EKF, Pronto, etc.). I coordinate and integrate the laboratory's development efforts to create cohesive software utilities.
I develop, maintain, and repair software at all levels—from embedded firmware and low-level controllers to high-level motion planning. Daily, I work with state-of-the-art hydraulic robots, including the 12-DoF quadrupeds HyQ and HyQ2Max, and the 6-DoF HyA arm. Our systems operate on a real-time Xenomai Linux kernel, and the architecture heavily relies on tools and frameworks like ROS, Gazebo, SL simulator, LCM, RViZ, KDL, and RBDL.
Reuters - One-armed HyQ robot can knock obstacles out of its wayIEEE Spectrum - HyQ Quadruped Robot Is Back With Even More Tricks
Senior Robotics Engineer - Humanoid Manipulation
WPI-CMU DARPA Robotics Challenge Team -
Carnegie Mellon University & Worcester Polytechnic Institute, Dec 2013 -- Jun 2015
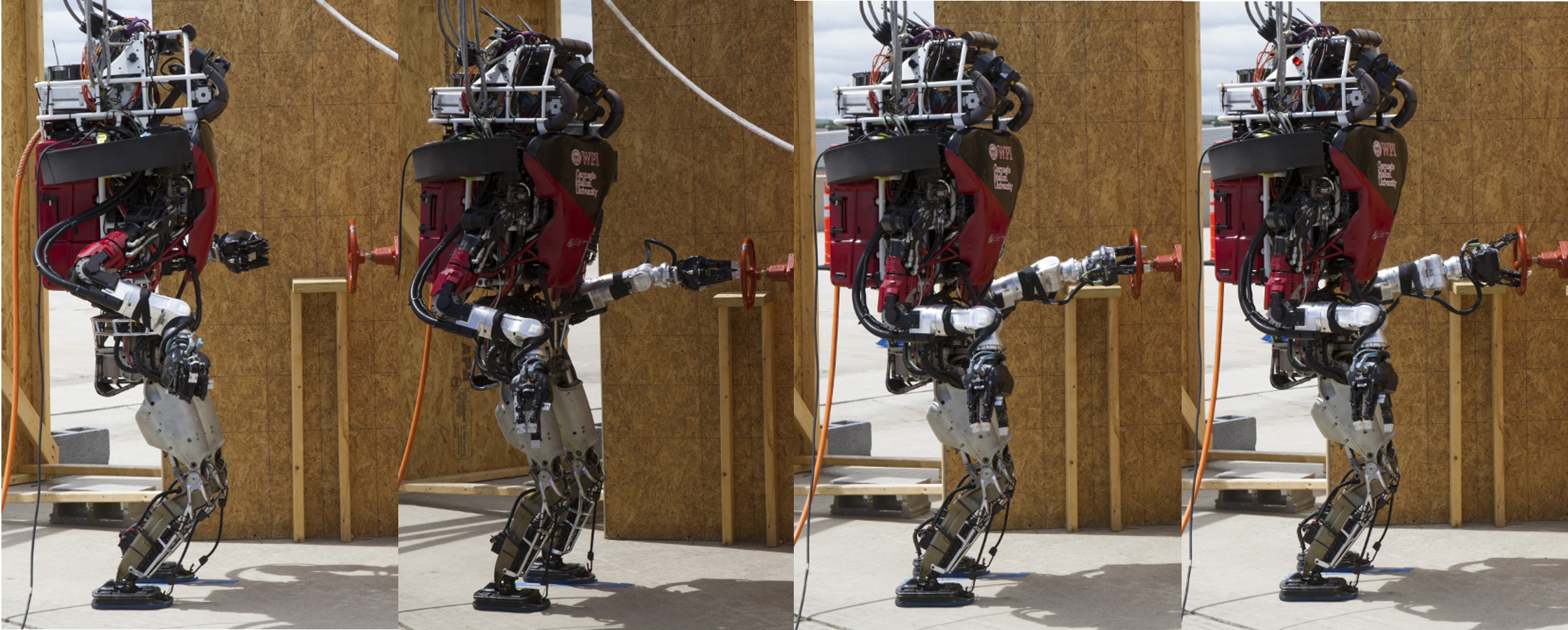
As the Manipulation Leader for the WPI-CMU team in the DARPA Robotics Challenge (DRC), I gained extensive experience with the 30-DoF Boston Dynamics Atlas humanoid robot. I researched and implemented state-of-the-art full-body motion planning libraries—including MoveIt (OMPL), CHOMP, CBiRRT2, and TrajOpt—with an emphasis on simultaneously maintaining multiple constraints such as balance, collision avoidance, and end-effector positioning.
Leading a team of graduate and undergraduate students, I coordinated the development, testing, and integration of these advanced algorithms. Our collaborative efforts culminated in a highly competitive entry for the DRC, showcasing significant advancements in robotic manipulation and control systems.
I integrated systems from perception to full-body manipulation controllers using combined inverse kinematics and inverse dynamics control loops. These were resolved through a quadratic programming approach to execute comprehensive path plans on the Atlas robot. This integration enabled the robot to perform complex tasks with greater precision and reliability.
Computer World - DARPA challenge greatly propelled humanoid robotics -- and WPIIEEE Spectrum - DARPA Robotics Challenge Finals: What We Learned on Day 1
Washington Post - The Pentagon’s fleet of robots may not be so menacing after all
Boston Globe - Success and falls at the robot Olympics
Globo - Robôs vão atuar como assistentes de enfermagem para combater Ebola
Computer World - WPI's team gears up for final battle of the bots
Humanoid Manipulation Research Assistant
Worcester Polytechnic Institute, July 2013 -- Dec 2013
As the Manipulation Leader for the WPI-CMU team in the DARPA Robotics Challenge (DRC) Trials, I led the development of multiple manipulation approaches for the 30-DoF Atlas humanoid robot. I focused on creating upper-body 6- and 9-DoF path planners based on ROS MoveIt (OMPL), as well as full-body controllers utilizing a combined Inverse Dynamics and Inverse Kinematics Quadratic Programming technique.
I designed a 6-DoF planning and motion controller from scratch, enhancing the robot's precision and responsiveness. My work involved experimenting with various user interface devices for manipulation, including the Razer Hydra and the surgical robot Da Vinci operator master unit, to improve operator control and ergonomics. I also compared and developed multiple grasping techniques using iRobot, Sandia, and Robotiq three-finger robotic hands, optimizing the robot's ability to interact with diverse objects.
As the task leader for the drill and valve challenges, I oversaw the programming and execution of complex operations. For the drill task, the Atlas robot picked up a rotary tool from a shelf, walked to a vertical drywall sheet, and cut a predetermined polygon shape, demonstrating precise manipulation and mobility. For the valve task, the robot successfully closed three wall-mounted industrial-sized valves, showcasing its capability to perform critical mechanical operations.
Leading a team of graduate and undergraduate students, I coordinated the development, testing, and integration of these advanced algorithms and control systems. Our collaborative efforts resulted in a highly competitive entry for the DRC Trials, pushing the boundaries of humanoid robotic manipulation.
Graduate Research PosterUndergraduate Senior Qualifying Project
Worcester Polytechnic Institute, May 2010 -- May 2011
Developed a robotic entry for the 18th Annual Intelligent Ground Vehicle Competition. The vehicle had a custom aluminum chassis and fused the sensory input from a LIDAR, stereo vision cameras, 6 DOF Inertial Measurement Unit, and GPS signal to drive autonomously through a complex outdoor obstacle course using a SLAM algorithm implementation in ROS.
IGVC Design Report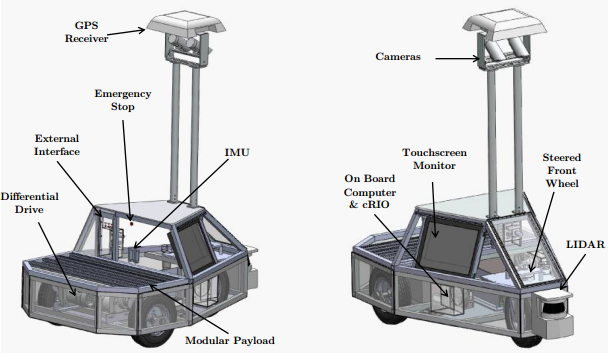
Education
Master of Science in Robotics Engineering
Worcester Polytechnic Institute - August 2013 to May 2014 - GPA:4.0
Bachelor of Science in Electrical & Computer Engineering and
Robotics Engineering
Worcester Polytechnic Institute - August 2007 to May 2011 - GPA:3.8